Nature Communications! The research team publishes research findings on maneuverable underwater vehicle for near-seabed observation
The research team from the College's National Key Laboratory of Intelligent Marine Vehicle Technology, Professor Wang Gang, has recently published their latest research findings on maneuverable underwater vehicles for near-seabed observation in the international authoritative journal Nature Communications, under the title "A Maneuverable Underwater Vehicle for Near-seabed Observation". The robot addresses the bottleneck issue of sediment disturbance that commonly affects traditional underwater robots during near-seabed observations, achieving a resolution of centimeter-level for near-seabed environmental observations.
Harbin Engineering University is the sole author institution of the paper, with Professor Wang Gang as the sole corresponding author. The co-first authors are doctoral students Liu Kaixin and Ding Mingxuan. Other contributors include postgraduates Pan Biye, Yu Peiyeh, Lu Dake, Chen Siwen, and Zhang Shuo.

Underwater robots serve as a critical technological means in current marine exploration, playing an important role in areas such as marine resource detection. The team found that existing research faces many challenges when dealing with complex seabed topography. Wheeled and legged robots often have their functionality impacted by rugged terrain, while hovering robots tend to disturb sediments during operations, affecting operational visibility. In response to the contradiction between the mobility of robots and the disturbance to the seafloor, the team started from the basic design of the robot, innovating in configuration design, environmental perception technology, and motion control methods, providing new ideas for improving the locomotion performance of underwater robots.
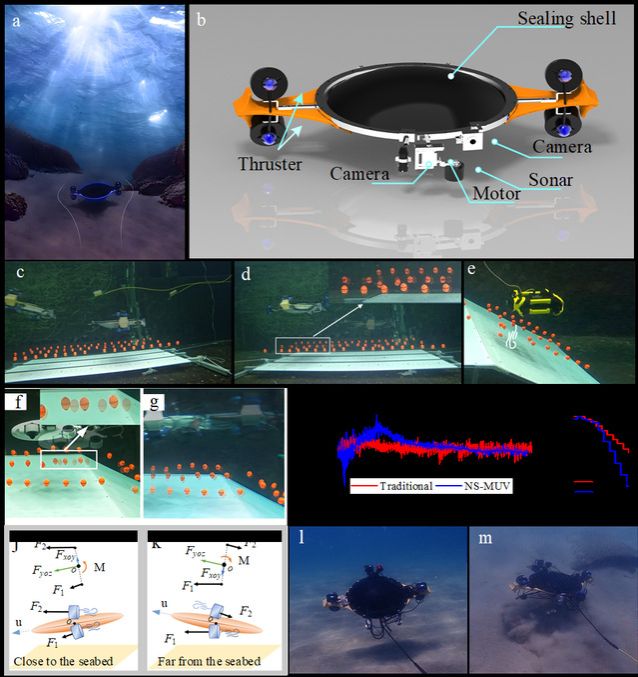
The maneuverable underwater vehicle adopts an engineering design approach, optimizing the wake distribution during ascent through a uniquely designed propulsion system configuration, thereby minimizing disturbance to bottom sediments. The team used precise model identification technology and a low-noise angular acceleration feedback system to obtain the dynamic characteristics of the robot, monitoring external disturbances in real time. Experiments showed that this algorithm can effectively withstand instantaneous impact disturbances caused by the equivalent of 30% of the maneuverable underwater vehicle's own weight falling, ensuring its movement stability in the near-seabed environment. Facing complex seabed topography, the team developed a trajectory tracking algorithm that considers attitude constraints, allowing the maneuverable underwater vehicle to flexibly adjust its posture in complex terrains, better adapting to changes in the seabed topography.
Nature Communications was established in 2010 and is a comprehensive scientific publication covering all academic fields under the Nature brand. The journal focuses on influential research results across various scientific domains and is highly recognized by scholars both domestically and internationally, being a top-tier journal in Zone 1 of the Chinese Academy of Sciences.
Paper link: https://rdcu.be/d1EuP

 Homepage
Homepage 中文
中文

